
Occasionally we are asked the question about the ability to over-speed a motor using a variable frequency drive (VFD). This question usually comes up when there are capacity issues with a mechanical system and the fan or pump motor is being relied upon to compensate. In general, the answer to the question is yes – a motor can be run at higher than its nameplate speed. However, there is a trade-off between operating at higher speeds and the resulting torque (rotational force) capability of the motor. Typically, in most common commercial applications with a constant supply voltage such as 460/480vac the relationship between torque and speed is such that the torque is reduced as the motor speed is increased. There is a direct relationship between speed and electrical AC operating frequency. For example, 0 Hz is equal to 0 rpm and 60 Hz is equal to full speed. Hence, 120 Hz would be the equivalent of double speed.
Rules of thumb- a 3600 rpm motor can be run safely up to about 75 Hz (or 25% above its rated speed). An 1800 rpm motor can be run safely up to 120 Hz or 200% of its rated speed but…as the accompanying graph indicates, at double speed, the motor can only operate with 25% of its nominal full speed torque.
The real limiting factors for over-speeding a motor are not so much electrical as they are mechanical. Bearing wear and rotational instability resulting from changes in mechanical balancing requirements at speeds above the nominal can lead to motor failure and/or unacceptable vibrations when operating a motor continuously at higher than its rated top speed.
The golden rule to remember is that it is critical to confer with the motor manufacturer before attempting to over-speed any motor.
The following information discusses in some detail what happens to the Volts/Hz ratio and also what the motor torque implications are when operating a motor at higher speeds than its nameplate speed.
AC MOTOR OPERATION ABOVE BASE SPEED
Maximum Motor Speed
Standard AC motors rated for 60Hz operation may be run at higher frequencies when powered by an AC drive. The top speed depends upon the voltage limits of the motor and its mechanical balancing. 230V and 460V motors normally employ insulation rated for as much as 1600V, so the voltage limit is not usually a problem. Average 2 pole industrial motors can safely exceed its base speed by 25%. Many manufacturers balance their 2 pole and 4 pole rotors to the same speed – 25% over the 2 pole base speed. A 2 pole motor may therefore operate up to 125% over base speed before reaching its balance limit. A 60hz 4-pole motor may have the ability to run up to 135Hz, whereas a 60 Hz 2-pole motor would reach its balance limit at 75Hz. Both motors would run at the same rpm. Always contact your motor’s manufacturer if you plan to operate at these speeds.
Constant Voltage Operation
What happens to the volts per hertz ratio above a rated frequency? If output frequency is increased to 120hz with 100% voltage applied to the motor; the Volts per Hertz ratio of the drive is no longer 7.6 but rather 3.83. The same Volts per Hertz ratio results when a line started motor is operated at 60Hz with only 50% voltage applied (for reduced voltage starting). As might be expected the effect on torque is the same. Recall that torque varies as the square of the applied voltage when using a reduced voltage starter:
Torque = (Start Voltage E2 / Base Voltage E1) quantity squared.
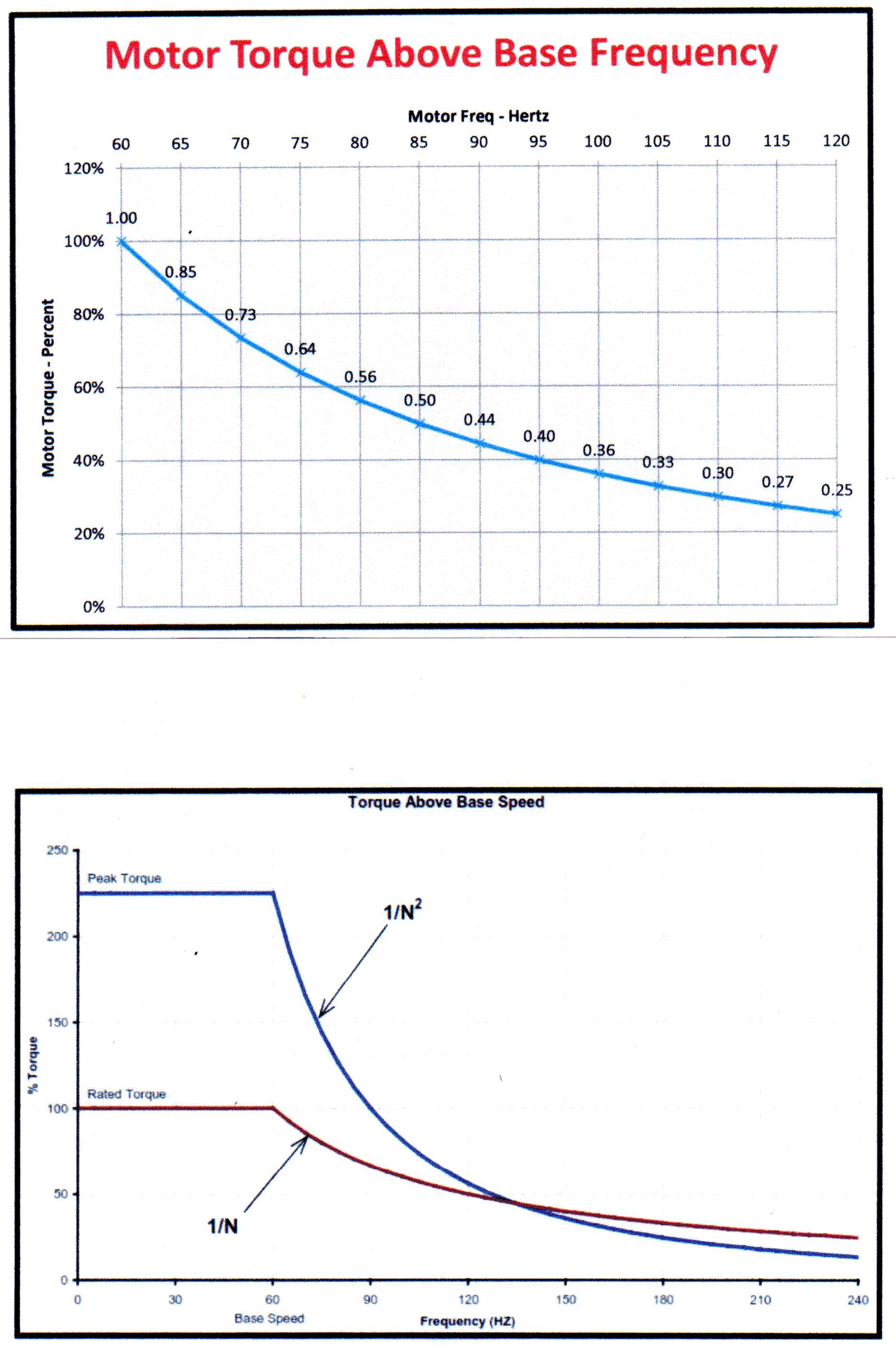
As such, the maximum torque at 120Hz is only 25% of the maximum torque at 60Hz. If the VFD output frequency is reduced from 120hz to 90hz at a constant voltage, the Volts per Hertz ratio improves from 3.83 to 5.1V/Hz. This is the same as providing 66% voltage at 60Hz to a line-started motor. Torque will be 0.662 or 44% of the full voltage torque at 60Hz. The graph illustrates the peak torque curve for constant voltage operation from base speed to 4 times base speed.
Motor Torque Above Base Frequency
Since the voltage, in reality, is not changing above the base speed, it is more appropriate to define torque in terms of frequency or RPM change instead of voltage change. It can be stated then that torque above base speed drops as the square of the frequency – doubling the frequency, quarters the available torque. Applied frequency and synchronous speed are equivalent, so going a step further; torque may be defined in terms of speed. In the constant voltage range then, motor torque drops off as the inverse of synchronous speed squared, or 1/(N squared). This is shown in the accompanying graph.
Torque = (line frequency/extended frequency)squared
Or
Torque = (base speed/extended speed)squared
Many machine applications are constant horsepower in their load characteristics. As speed increases, the torque drops off as the inverse of the speed, or 1/N. The torque drop-off is not as severe as the motor’s peak torque, 1/(Nsquared). The accompanying graph compares peak torque to rated torque.

Pingback: VFD Motor Specification | Physics Forums - The Fusion of Science and Community
I just want to ask, I have 2.2 kW, 3 phase motor rated at 1500 rpm motor 50Hz, Can i used ABB VFD to increase the speed above the rated speed about 20% to 30 % rated speed.
How can I Overspeeding the motor. Do I need to change the base frequency of the motor?
Good observation. Great awesome issues here. I am very happy to look your post. Thank you so much and i am taking a look ahead to contact you.
3600 RPM Variable frequency drives
Aside from check with the motor manufacturer, what about cases where additional voltage CAN be applied to the motor to keep the v/hz line linear and therefore not operate at constant HP? Couple of different thoughts come to mind, I would suspect that the total input current to the motor is probably okay so long as you stay within the service factor. However, faster operation also means more fan cooling availability as well, so that will help the situation. In my particular case, I’m not talking about doubling the speed of the motor, I’m looking at a 10 pole induction motor being ran up to about 63 Hz or so on a pump application. Yes, for quadratic loads if you double speed, you’re going quadruple the load, but a 4% speed increase in this case is only 8% load, and even that should be within the window of a 1.15 service factor with additional air from the fan.
Kevin,
Thanks for the excellent question! My initial thoughts are that you are correct, and that this small increase in speed with the factors that you mentioned will not be of any significant issue. I did check with a few of out motor vendor gurus and they also agreed that if all is correct as you state, then there should be no issue. They did mention that you may want to closely monitor the motor temperature to be certain that you are not over heating the unit.
Thanks again for the inquiry!
Bob
Is there an equivalent chart tot he one posted here as related to the PF?
I am most interested in how the PF is affected as well in addition to the torque relationship with the speed
Thank you
Thanks for the inquiry!
This is an answer best suited for my vendors motor application specialist. If you would email me directly, I will put you two in contact with one another.
bobculley@deltaautomation.com
Thanks,
Bob Culley
Great Article & very informative.
1) With regard to the reducing Torque as Freq increases, does this mean that the Motor should be oversized to take into consideration that at say 85Hz the motor can only deliver 50% of its rated 60Hz Torque? How is this Oversizing estimated/calculated?
2) What about the Opposite Situation of running Motors below their Nameplate rated speed?
I have an application where I want Nominal Running Speed = 1.9 RPM (from a Helical bevel Gearbox) with ability to decrease of increase that Nominal Output Speed in the Range 1.15Rpm-3.3 rpm.
I am considering 2 Options;
Option#1. Select a gearbox with 1.8rpm output (in this case 3kW 3Ph 415v 50Hz 1450rpm with KAT127+RF77 for Tq=14,186Nm SF=0.86 ratio=790 1.8rpm) so in this case I would use VFD for 32-92Hz to get the desired 1.15-3.3rpm range.
But I’m concerned running 92 Hz might have problems regarding Torque output.
Option #2. Select a Gearbox with 3rpm output ( in this case 4kW 3Ph 415v 50Hz 1450rpm with KAT127+RF77 for Tq=11,205 Nm SF=1.09 ratio=468 3rpm) so I would then use VFD for 19-54Hz to get the desired 1.15-3.3rpm range.
Any issue running 19Hz continuously (i will be using an Auxiliary fan)?
Is it Generally better to run Motor with VFD in the range Below (ie 19-54Hz ) or Above (ie 32-92Hz) the Standard Freq which in this case is 50Hz?
Russell,
Great questions! The issue with running a typical TEFC motor very slowly is cooling. This is termed the “turn down ratio”. Specified by the manufacturer, it is expressed as “10:1” or “100:1” etc. Basically it means that, in the 10:1 example, you can safely run the motor at 1/10 of its’ rated full speed and still get sufficient cooling. Of course, it you have an external cooling/blower fan that rule does not apply.
In your example, i would suggest that your option # 2 may be the best overall solution. Over speeding a motor will, as you mentioned, reduce the torque. I personally would never advise over speeding a motor as a permanent solution to any application.